機(jī)車調(diào)車無(wú)線推送視頻預(yù)警系統(tǒng)
- 時(shí)間:2025-10-23作者:深圳龍鐵高科技術(shù)有限公司瀏覽:221
深圳龍鐵高科技術(shù)有限公司專注于機(jī)車AI視覺系統(tǒng),機(jī)車自動(dòng)充電系統(tǒng),機(jī)車智能駕駛系統(tǒng),機(jī)車智能駕駛輔助系統(tǒng),車鉤碰撞距離檢測(cè)系統(tǒng),智能駕駛感知系統(tǒng),司機(jī)分心駕駛檢測(cè)系統(tǒng),機(jī)車500萬(wàn)高清視頻系統(tǒng)等, 歡迎致電 13826575588
詞條
詞條說(shuō)明
在機(jī)車每端司機(jī)室操縱臺(tái)上面向司機(jī)面部各安裝1個(gè)狀態(tài)識(shí)別算法攝像機(jī),攝像機(jī)根據(jù)機(jī)車運(yùn)行方向乘務(wù)員面部狀態(tài),當(dāng)滿足報(bào)警值時(shí)通過(guò)狀態(tài)攝像機(jī)輸出報(bào)警語(yǔ)音間斷瞭望在線提醒 間斷瞭望在線提醒分為三級(jí)提醒,當(dāng)機(jī)車乘務(wù)員在機(jī)車運(yùn)行中持續(xù)低頭、盹睡、目視方向非運(yùn)行前方的時(shí)間達(dá)到設(shè)定的閥值時(shí),裝置分別發(fā)出一、二、三級(jí)報(bào)警提醒語(yǔ)音,能夠觸發(fā)報(bào)警的條駕駛姿勢(shì)在線提示 駕駛姿勢(shì)在線提示,當(dāng)機(jī)車乘務(wù)員在機(jī)車運(yùn)行非端正坐姿坐在
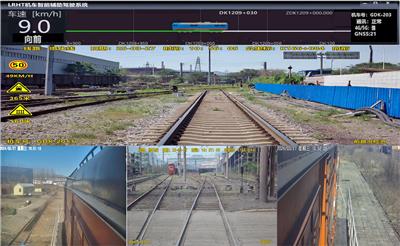
LRHT機(jī)車智能輔助駕駛系統(tǒng)LR-TRADS2.0正式發(fā)布
1 .機(jī)車精確定位目前機(jī)車定位主要靠輪速傳感器和GPS/北斗定位。使用輪速傳感器累計(jì)里程存在誤差累積問(wèn)題,GPS定位精度易受信號(hào)干擾和遮擋,在山區(qū)誤差較大,在隧道內(nèi)無(wú)法工作。位置更新率只有1Hz ,不能滿足實(shí)際需求。衛(wèi)慣組合是將衛(wèi)星定位技術(shù)與慣性導(dǎo)航技術(shù)相互組合,實(shí)現(xiàn)優(yōu)勢(shì)互補(bǔ),既保證在正常情況下定位精度小于1米,定位頻率達(dá)到100Hz,也能保證在山區(qū)、隧道內(nèi)部的定位精度不受影響,同時(shí)還能輸出準(zhǔn)確的
LRHT基于深度學(xué)習(xí)的乘務(wù)員狀態(tài)預(yù)警裝置已成功上市
隨著我國(guó)鐵路的快速發(fā)展,鐵路運(yùn)輸問(wèn)題是現(xiàn)代交通永恒不變的主題,越來(lái)越被重視。機(jī)車乘務(wù)員在機(jī)車運(yùn)行中起著作用,他直接決定了列車能否正常運(yùn)行,他們是保證一趟列車運(yùn)行的重要關(guān)鍵。如何讓他們?cè)谛旭傔^(guò)程當(dāng)中始終保持集中注意力,不讓精神狀態(tài)不佳威脅到列車正常運(yùn)行,這是非常重要的。因此,對(duì)機(jī)車乘務(wù)員的管理成了重中之重。在機(jī)車乘務(wù)員管理方面,針對(duì)乘務(wù)員值乘過(guò)程中關(guān)鍵項(xiàng)點(diǎn)的作業(yè)標(biāo)準(zhǔn),制定標(biāo)準(zhǔn)化要求,依照系統(tǒng)科學(xué)的方
鐵路邊坡落石視覺監(jiān)測(cè)預(yù)警系統(tǒng)
基于視覺識(shí)別入侵監(jiān)測(cè)是計(jì)算機(jī)圖像視覺技術(shù)在防范領(lǐng)域應(yīng)用的一個(gè)分支,是一種基于目標(biāo)行為的智能監(jiān)控技術(shù)。區(qū)別于傳統(tǒng)的移動(dòng)偵測(cè)(VMD-VideoMotionDetection)技術(shù),智能視頻分析首先將場(chǎng)景中背景和目標(biāo)分離,識(shí)別出真正的目標(biāo),去除背景干擾(如樹葉抖動(dòng)、水面波浪、燈光變化),進(jìn)而分析并追蹤在攝像機(jī)場(chǎng)景內(nèi)出現(xiàn)的目標(biāo)行為。具備識(shí)別、思考、描述三個(gè)典型特征的感知型攝像系統(tǒng),它能基于視頻的智能分析
聯(lián)系方式 聯(lián)系我時(shí),請(qǐng)告知來(lái)自八方資源網(wǎng)!
公司名: 深圳龍鐵高科技術(shù)有限公司
聯(lián)系人: 邵旺龍
電 話: 0755-82596822
手 機(jī): 13826575588
微 信: 13826575588
地 址: 廣東深圳龍崗南灣街道布沙路深馬工業(yè)園A棟502A-502B-502C
郵 編:
網(wǎng) 址: fujilong.b2b168.com
相關(guān)推薦







相關(guān)閱讀
1、本信息由八方資源網(wǎng)用戶發(fā)布,八方資源網(wǎng)不介入任何交易過(guò)程,請(qǐng)自行甄別其真實(shí)性及合法性;
2、跟進(jìn)信息之前,請(qǐng)仔細(xì)核驗(yàn)對(duì)方資質(zhì),所有預(yù)付定金或付款至個(gè)人賬戶的行為,均存在詐騙風(fēng)險(xiǎn),請(qǐng)?zhí)岣呔瑁?
- 聯(lián)系方式
公司名: 深圳龍鐵高科技術(shù)有限公司
聯(lián)系人: 邵旺龍
手 機(jī): 13826575588
電 話: 0755-82596822
地 址: 廣東深圳龍崗南灣街道布沙路深馬工業(yè)園A棟502A-502B-502C
郵 編:
網(wǎng) 址: fujilong.b2b168.com
- 相關(guān)企業(yè)
- 深圳市凡可為科技有限公司
- 上海分朗智能科技有限公司
- 深圳市鵬鑫威科技有限公司
- 深圳頭程國(guó)際貨運(yùn)代理有限公司
- 深圳市達(dá)普通訊有限公司
- 深圳市科華爾科技有限公司
- 廣州市旺東電子科技有限公司
- 深圳市保駕科技有限公司
- 廣州市騰廣電子科技有限公司
- 商家產(chǎn)品系列
- 產(chǎn)品推薦
- 資訊推薦
¥1500.00

¥10000.00








